Robotter
 CVS
CVS
Robocup - DTU
Madam Skrald
 Billeder
Billeder
 MS II - Robocup 2001 ( 11M )
MS II - Robocup 2001 ( 11M )
Første gang MS III kører (213K )
Første gang MS III følger en linie (880K )
Et sammenklippet gennemløb af banen med MS III
(1.8M )
Nyheder
25. April:
Det er lykkedes at få oversat balance regulatoren til MSP C kode, det er stadig et problem at nogle af beregningerne vil udvikle sig til meget store tal. Det næste der skal ske er at værdierne i matricerne bliver lagt ned og det hele bliver afprøvet. Der er opstået nogle uforudsete problemmer med opladning af vores batterier, det ender nok med at blive til en ny batterilader bestående af en LM317 og en operationsforstærker som stopper den når batteri temperaturen bliver for høj.
23. April:
Balanceringsmodel med observer virker i Matlab, men det vil ikke være sådan lige til at få det pakket ned i en MSP da modellen regner med fortløbende tal. Det er lykkedes at lave en udvidelse af robotten så den kan medbringe sidste års liniesensor. Reguleringen er indtil videre en simpel P regulator og som kun holder til højre, men det ser overraskende godt ud taget i betragtning at reguleringen endnu ikke tager hensyn til den aktuelle hastighed.
En hurtig kørsel ( 1.8M )
En langsom kørsel ( 3.0M )
Sådan skal den ikke gøre til RoboCup ( 508K )
Før den 23. April...
Billede af de første udledninger af vores LQR/kalman filter balance model.

Billede fra den første test af motorcontroller, her med starthjælp fra gamle Madam Skrald III. Hjulene (encoderne) fra Madam Skrald III anvendes til at styre hastigheden på Tumlingen...

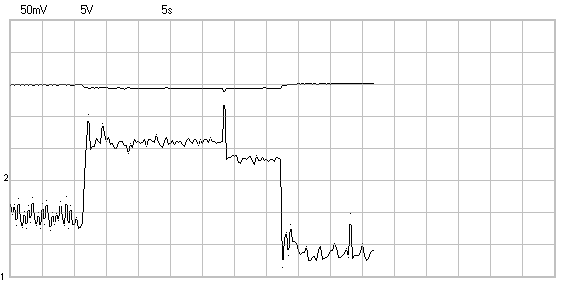
Scop målinger af strøm og spænding ved belastning fra 2 motorere
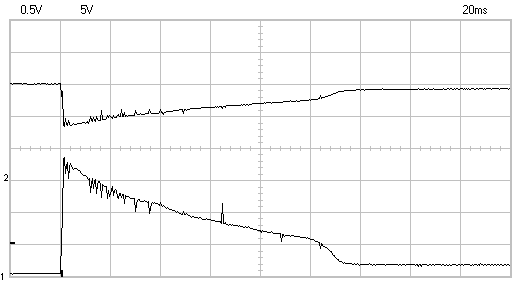
Kanal 1 måler strøm over en 0R1 modstand, kanal 2 måler batterispænding. Første scop billede viser gennemsnit over længere tid,
det ses at i "standby" bruges omkring 500mA, mens der bruges lidt over 2A ved fuldfart (ubelastet). Nederste scop billede viser en "spike" ved acceleration
fra stop til fuld kraft, der ses her en strømspike på op imod 20A samt en halvering af batterispændingen som først er rettet op igen efter 120 millisekunder.
Billeder fra fremstilling og samling af Tumlingen





2D model af vores nye robot Tumlingen:
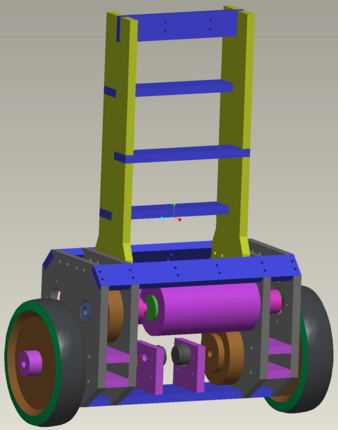
3D model af Tumlingen:

Opdateret: Thu, 26-Oct-2006 18:48